
In the City, All Roads Lead to the River
Mixed media with tracking traffic signal.
The image above is show work in progress on a mixed media free standing artwork, using a traditional painting and a salvage traffic signal controlled via a stepper motor, gear box and and Arduino microcontroller, a vision system and range finding sensor. The system is designed to track viewer positons, with the traffic signal acting in a crude from of surveillance following as they move.
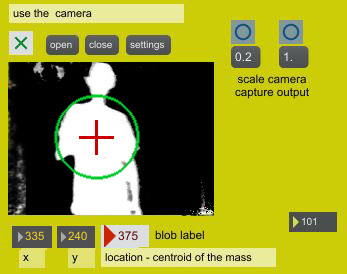
The lower left image shows an example of control software prepared using computer vision in MaxMSP. The vision system is able to locate significant shapes and identify as a human viewer in the gallery space.
The system collects the horozontal position and proximity of the viewer to the painting. This data is passed via serial communication to a micro-controller. The micro-controller drives a stepper motor to rotates the traffic signal, following the viewer.
The artwork has imagery and responsiveness on both the front face and the back face. On the rear one find an image of a city road map with roads leading to a river, but no bridges to cross. Miniature cars follow on a tracks with cars approaching the rive but never to be able to cross. the car move when viewers are located witjhin proximity.
Collaborators: Pensyl, W. R.; Stanziano, Zach; Canal, Chris; Tat, Allen; Acevedo, Leo; Pendergast, Sean; Treadway, Shane; Rhee, Paul
1. Wang Mingjia, Zhang Xuguang, Han Guangliang, Wang Yanjie, "Elimination of impulse noise by auto-adapted weight filter", Optics and Precision Engi-neering, 2007, 15(5), pp. 779-783.
2. Messom, C., Barczak, A., Fast and Efficient Rotated Haar-like Features us-ing Rotated Integral Images, Int. J. of Intelligent Systems Technologies and Applications, 2009 Vol.7, No.1, pp.40 - 57
3. Jean-Marc Pelletier
http://jmpelletier.com/cvjit/ https://github.com/
Cycling74/cv.jit/releases
4. Viola, P., & Jones, M. (2001). Robust real-time object detection. Paper presented at the Second International Workshop on Theories of Visual Modelling Learning, Computing, and Sampling
5. Bradski, G. and Kaehler, A., (2008). Learning OpenCV. OReilly.
6. http://www.nist.gov/
huma nid/colorferet
7. https://cycling74.com/