Three Dimensional Location Tracking Using Ultrasonic Devices
This is new research for a contril system for responisve and reactive art work using positioning and localization technology. The primary objective is to be able to track accurately the 3D position of any object within an indoor environment. The problem of indoor localization is very tricky – unlike outdoor tracking where GPS can be used. There a few competing technology for indoor tracking, namely ultra-wide band (UWB), Wi-Fi, GSM, ultrasonic, computer vision etc.
Except for methods using computer vision, the above mentioned methods use either the time-of-flight method or the received signal strength indication (RSSI) method. Each of this method has both advantages and disadvantages in terms of accuracy, cost, robustness and ease of setup. In this project, we explore the ultrasonic tracking method, due to its inherent high accuracy and low cost. ultrasonic tracking basically measures the time of flight of ultrasonic waves, which is relatively slow compared to the speed at which an embedded microcontroller can process. The system consists of
an array of ultrasonic receivers mounted on the wall or ceiling, and an ultrasonic transmitter carried by the paticipant that invokes a continuous wireless command to the software to capter the positioning data. When the transmitter transmits pulses of ultrasonic waves, it also transmit a short pulse of RF signal which is used to synchronize with the receivers. With this signals, the receivers knows exactly when the transmitter is transmitting the ultrasonic pulses. Each receiver then receives the ultrasonic a few milliseconds later, depending on their distance from the transmitter. Further, the system can be extended to large spaces using a cell formation and communication – similar to cell communistion in telephony.
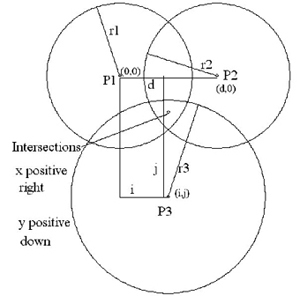
The ultrasonic transmitter triangulation
The receiver will then calculate the time difference between the receiving of RF and ultrasonic pulses, and since RF speed is very much faster (speed of light), the time difference is actually consider as the time of flight of the ultrasonic pulses from the transmitter to the receiver. Each receiver will then have their respective distance information from the transmitter. Using the multilateration algorithm, the 3D position of the transmitter can be found.
Further work will explore cellular grids of multiple sensors to allow for a postioning in a large scale environment.
initially developed in the Interaction and Entertainment Research Centre, Nanyang Technological University, Singapore.